
一个易于理解的常见机器人术语词汇表
已发表: 2021-09-14人们对机器人的定义往往非常狭隘。
金属臂、伺服电机和视觉传感器不是机器人制造的。 如果你粗略地审视一下机器人的历史,你会发现很多在电力出现之前发明的机器人的例子,它们与今天的高科技创新一样多是自主机器。
机器人术语 A 到 Z:
- 机器人术语 A 到 E
- 机器人术语 F 到 K
- 机器人术语 L 到 Z
相关机器人术语
在上网时,您可能会遇到几个以各种不正确方式使用的术语。 本指南将为您提供理解学者和自封的思想领袖所抛出的行话所需的一切。
谁创造了“机器人”这个词?
作家 Karel Capek 在其 1920 年的戏剧Rossum 的 Universal Robots 中首次使用“机器人”一词来描述人工自动机。
机器人术语 A 到 E
一个
执行器:读取编程信号并将其转换为机械运动的电机。
Aerobot :一种以独立飞行能力而著称的空中机器人。
安卓:一个设计成类似于成年男性的人形机器人。 “andro”前缀是指机器指定的男性性别。
铰接式机械手:一种机械臂,分为由一个或多个关节控制的独立段。
自动机:自动机器取代人工的过程。
自动驾驶车辆:任何无需人工直接控制即可运行的车辆,通常通过内置的自动驾驶系统。
轴/自由度:这个术语是指机器人手臂或身体如何操纵。 这对应于特定机器中的接头数量。 虽然关节与自由度的比例不是 1:1,但更多的关节是实现机器人更大自由度的最直接方法。
乙
仿生学:使用生物系统或有机发生的过程来开发和设计新机器人的行为。
C
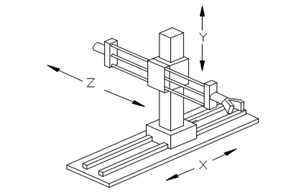 笛卡尔机器人艺术的功能,由 toshiba.com 提供
笛卡尔机器人艺术的功能,由 toshiba.com 提供
笛卡尔机械手:带有棱柱关节的机械臂,用于沿 X、Y、Z 坐标系移动。
中央处理器:功能上,机器人的“大脑”。 它是主电路板和过程预编程和命令输入。
云机器人:任何从云中获得功能能力的机器人。
协作机器人:直接与人类交互的机器人。
控制器系统:某种类型的计算机,用于存储数据、执行程序并指导机器人的操作。
Cyborg: “控制论有机体”的简写,它是任何同时拥有生物和人造部分的存在。
对这些术语是如何产生的感兴趣? 查看我们对机器人历史的概述! |

D
停机时间:机器人不工作的任何时间段。 这通常用于指操作故障或错误。
乙
末端执行器:专门设计用于允许机器人执行特定任务的工具的总称,例如夹具或焊枪。
 工业机器人末端执行器的示例(来源:robots.org)
工业机器人末端执行器的示例(来源:robots.org)
机器人术语 F 到 K
F
反馈传感器:将环境数据反馈给中央处理单元的机制,中央处理单元使用它来调整机器人的运动。
 机器人传感器的不同变体(来源:http://iggyclass.blogspot.com)
机器人传感器的不同变体(来源:http://iggyclass.blogspot.com)

力限制:一种安全功能,可以对机器人进行编程,使其以缓慢、安全的速度移动,以允许人类在没有障碍物或防护罩的情况下在其周围工作。
力传感器:一种监控机器人主机械手施加的力的设备,通常作为人类的安全措施并监控设备上的应变。
G
龙门架:固定在平台或轨道上的机器人起重机构。
Gynoid:类似于机器人,gynoid 是用来调用女性身体的。
 电子游戏星际争霸 II 中的女性化机器人示例
电子游戏星际争霸 II 中的女性化机器人示例
H
触觉:利用机器人操纵器中的触觉来调整机器运动的技术。
线束:为机器人的一部分提供电力和数据的捆绑电线。
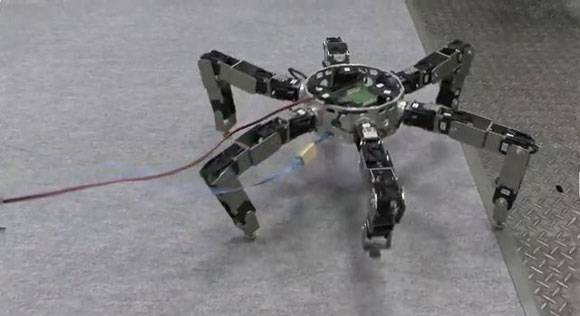
六足机器人:从有机昆虫中汲取灵感的六足机器人。
类人机器人:任何旨在模仿人类并执行传统上人类独有的活动的机器人。
水力学:一种在压力下通过液体产生力的方法。
我
工业机器人:设计用于执行专门命令以填充制造工业链的一部分的机械手。 例如,可以对工业机器人进行编程以将汽车框架焊接在一起。
输入设备:允许人类与机器人交互的任何设备。 通常,这是为了对未来的动作进行编程或直接控制即时运动。
智能机器人:无需人工直接干预即可根据感官数据调整功能的机器人。 通常是指机器人技术和某种形式的人工智能的融合。
Ĵ
雅可比矩阵:一组用于帮助定位机器人的算法。
机器人术语 L 到 Z
大号
激光:一束窄且聚焦的光束,通常用作机器人的非接触式传感器,可用于从测距到焊接的任何事情。
ñ
Nanobot:任何由分子组件构成并在纳米级(十亿分之一米)运行的自主设备
磷
有效载荷:有效载荷是指特定机器人可以承载或举起的重量。 这将影响给定机器的部署规模和复杂性。
夹点:任何可能夹住人体附肢或衣服的外露关节。
气动:一种使用压缩气体或空气产生力的方法。
动力外骨骼:一种可穿戴机器,可增加人体的力量和耐力。
机械是科幻小说的主要内容,也是外骨骼有一天可能成为的戏剧性例子
假肢:可编程机器人旨在替换缺失的有机身体部位。 最常用于腿部和手臂截肢者的医学。
R
机器人:可以执行独立于人类直接控制或活动的任务的设备。
RPA:利用隐喻机器人工人执行复杂任务的软件。
小号
传感器:机器人可以用来收集各种形式的环境数据的各种仪器,这些数据允许机器根据这种刺激调整自己的位置和任务。
奇点:机器人手臂的配置,其中两个关节沿公共轴对齐。
ü
正常运行时间:机器人按预期运行的时间段。
知识之路
既然您了解了这些常用的机器人术语搜索,那么您应该了解探索机器人技术和 AI 的最新发展所需的一切! 当你在做的时候,看看一些类型的机器人,以很好地了解人们今天在这个领域谈论的内容。
有兴趣了解更多关于机器人的知识吗? 了解艾萨克·阿西莫夫的机器人三定律如何被用于数十年来的道德规划。